Nissan LEAF 2023 Manual
9.17.8.2. Limitações do sistema IEB com detecção de peões
Segue-se uma lista das limitações do sistema IEB. A utilização do veículo sem ter em conta estas limitações do sistema pode dar origem a ferimentos graves ou morte.
O sistema IEB não consegue detectar todos os veículos ou peões em todas as condições.
O sistema IEB não detecta o seguinte:
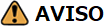
Peões que sejam de altura baixa (por exemplo, crianças), que estejam numa posição sentada, que estejam a utilizar dispositivos de mobilidade/skates, que estejam a andar de scooters ou em cadeira de rodas, ou que não estejam numa posição vertical ou de pé.
Animais de qualquer tamanho.
Obstáculos (por exemplo, cargas ou resíduos) na estrada ou na berma.
Veículos em sentido contrário ou na transversal.
Veículos cujos pneus sejam difíceis de ver, ou cuja forma traseira seja pouco nítida ou esteja obstruída.
Veículos estacionados.
O sistema IEB tem algumas limitações ao desempenho.
Se houver um veículo imobilizado no caminho do veículo, o sistema IEB não funciona quando o veículo é conduzido a velocidades superiores a cerca de 80 km/h (50 mph).
A detecção de peões não funciona quando o veículo for conduzido a velocidades acima de aproximadamente 60 km/h (37 MPH) ou abaixo de aproximadamente 10 km/h (6 MPH).
No que diz respeito a peões, o sistema IEB não emite o primeiro aviso.
O sistema IEB pode não funcionar devidamente ou detectar um veículo ou peão que siga em frente nas seguintes condições:
Má visibilidade (condições como chuva, neve, nevoeiro, tempestades de pó, tempestades de areia, fumo e o spray da estrada de outros veículos).
Se a área do sensor de radar ou a área da câmara do pára-brisas estiver coberta de sujidade, gelo, neve ou qualquer outra matéria.
Se uma luz forte (por exemplo, a luz do sol ou faróis altos) incidirem na câmara dianteira ou se ocorrer uma mudança de luminosidade brusca (por exemplo, entrar num túnel ou conduzir com relâmpagos).
Em condições de escuridão ou iluminação fraca, como à noite ou dentro de túneis, incluindo casos em que os faróis do veículo estejam apagados ou baixos, ou em que as luzes traseiras do veículo que circula à frente estejam apagadas.
Quando a direcção da câmara está mal alinhada.
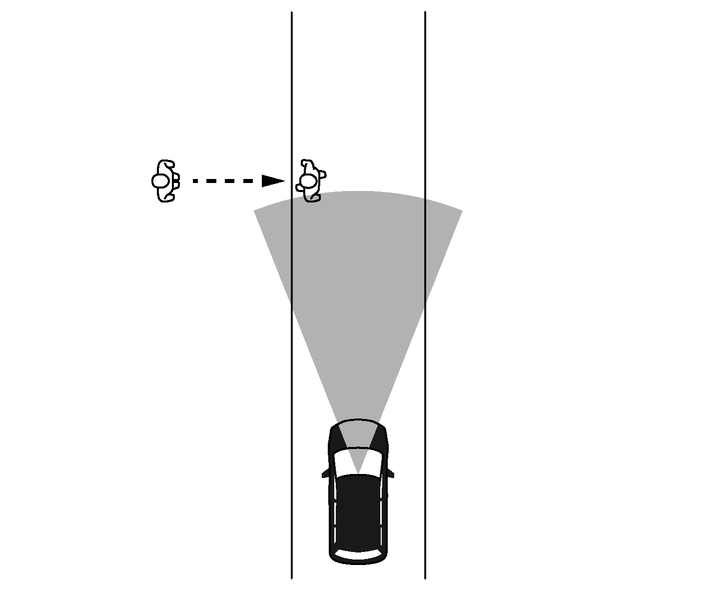
Ao conduzir em descidas acentuadas, em estradas com curvas acentuadas e/ou em estradas irregulares ou sujas.
Se houver interferência de outras fontes de radar.
Quando a posição ou o movimento do seu veículo mudar rápida ou significativamente (por exemplo, mudança de faixa, viragem do veículo, movimento brusco do volante, aceleração ou desaceleração repentina).
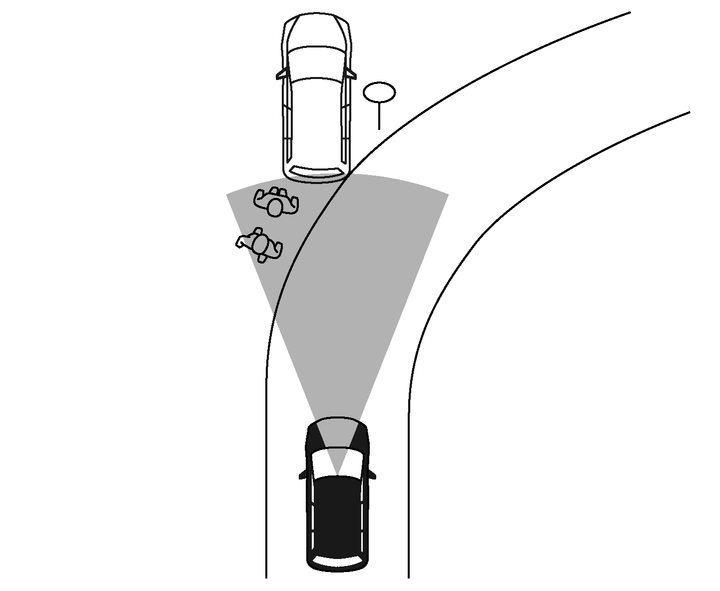
Quando o seu veículo ou o veículo ou o peão à sua frente se move rápida ou significativamente de forma que o sistema não consegue detectar e reagir a tempo (por exemplo, peão a mover-se rapidamente na direcção do veículo a curta distância, veículo que se intromete na sua faixa, mudança de faixas, fazer uma curva, movimento brusco do volante, aceleração ou desaceleração repentina).
Quando o veículo ou peão é desviado do percurso de avanço do veículo.
Se a diferença de velocidade entre os dois veículos for pequena.
O perfil do peão está parcialmente obscurecido ou indefinido; por exemplo, devido à bagagem que transporta, empurra um carrinho, usa roupa ou acessórios volumosos ou muito folgados ou tem uma postura única (por exemplo, está com as mãos ao alto).
Há mau contraste de uma pessoa com o fundo, como ter roupa com padrão ou cor semelhante ao fundo.
Durante aproximadamente 15 segundos após o sistema EV ser ligado.
Se o veículo que vai à frente tiver um formato único ou invulgar, uma distância ao solo extremamente baixa ou alta, transportar uma carga invulgar ou for estreito (por exemplo, um motociclo).
Quando o veículo ou peão estiver posicionado perto de um sinal de trânsito, uma área reflectora (por exemplo, água na estrada) ou estiver à sombra.
Quando vários peões estiverem agrupados.
Quando a visão do peão estiver obscurecida por um veículo ou por outro objecto.
O desempenho do sistema pode ser pior nas seguintes condições:
Veículo conduzido em piso escorregadio.
Veículo conduzido num declive.
Banco traseiro ou área de bagagem do se veículo carregados com bagagem excessivamente pesada.
O sistema foi concebido para verificar automaticamente o funcionamento do sensor (radar e câmara), dentro de certas limitações. O sistema pode não conseguir detectar algumas formas de obstrução na área do sensor, como por exemplo, gelo, neve ou autocolantes. Nestes casos, o sistema poderá não ter a capacidade de avisar adequadamente o condutor. Certifique-se de que verifica, limpa e desobstrui regularmente as áreas de sensor.
Em certas condições de estrada e de trânsito, o sistema IEB pode aplicar inesperadamente uma travagem parcial. Quando for necessária aceleração, prima o pedal do acelerador para se sobrepor ao sistema.
O sistema IEB pode funcionar quando forem detectados padrões, objectos, sombras ou luzes que sejam semelhantes ao contorno dos veículos, peões ou se forem do mesmo tamanho e tiverem a mesma posição das luzes traseiras de um veículo.
O sistema pode também continuar a funcionar quando o veículo da frente virar para a direita ou esquerda.
O sistema pode funcionar quando o seu veículo se estiver a aproximar ou a passar pelo veículo da frente.
Dependendo do formato da estrada (estrada com curva, entrada e saída de curva, estrada sinuosa, regulação da faixa, em obras, etc.), o sistema pode funcionar temporariamente devido ao veículo em sentido contrário em frente ao seu veículo.
O sistema IEB pode reagir a:
objectos à beira da estrada (sinal de trânsito, separador, peão, veículo, etc.)
objectos por cima da estrada (ponte baixa, sinal de trânsito, etc.)
objectos na superfície da estrada (carris, grelhas, placa de aço, etc.)
objectos num parque de estacionamento (viga, pilar, etc.)
peões ou motociclos que se aproximem da faixa de rodagem
veículos, peões ou objectos nas faixas adjacentes ou perto do veículo
peões em sentido contrário
objectos na estrada (tais como árvores)
Um peão que se aproxime da frente do veículo pela faixa de rodagem.
As distâncias de travagem aumentam em superfícies escorregadias.
O ruído excessivo interfere com o aviso sonoro, que poderá não ser ouvido.
Durante a condução em determinadas estradas, como por exemplo, estradas sinuosas, acidentadas, com curvas ou estreitas, bem como em estadas em obras, o sensor pode detectar veículos numa faixa diferente, ou pode, temporariamente, não detectar um veículo que circule à frente. Isso pode causar o funcionamento incorrecto do sistema.
A detecção de veículos também poderá ser afectada pela utilização do veículo (manobra de direcção ou posição de condução na faixa, etc.) ou pelo estado do veículo. Se tal ocorrer, o sistema poderá avisá-lo fazendo piscar o indicador do sistema e emitindo um sinal sonoro inesperadamente. Terá de controlar manualmente a distância correcta relativamente ao veículo da frente.