Nissan Juke 2024 Manual
7.22.1.3. Limitações do sistema IEB
Segue-se uma lista das limitações do sistema IEB. A utilização do veículo sem ter em conta estas limitações do sistema pode dar origem a ferimentos graves ou morte.
O sistema FEB não detecta todos os veículos, peões ou ciclistas em todas as condições.
O sistema IEB não detecta os seguintes objectos:
Peões pequenos (incluindo crianças pequenas) e animais.
Peões em cadeiras de rodas ou noutros transportes portáteis, como por exemplo, trotinetes, brinquedos utilizados por crianças e skates.
Peões que estejam sentados ou não se encontrem em posição totalmente erecta ou de caminhada.
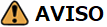
Veículos em sentido contrário.
Veículos na transversal.
Obstáculos na berma.
O sistema IEB tem algumas limitações ao desempenho.
Se houver um veículo imobilizado no caminho do veículo, o sistema IEB não funciona quando o veículo é conduzido a velocidades superiores a cerca de 80 km/h (50 mph).
No que diz respeito à detecção de peões e ciclistas, o sistema IEB não funciona quando o veículo é conduzido a velocidades superiores a aproximadamente 80 km/h (50 MPH) ou inferiores a aproximadamente 10 km/h (6 MPH).
O sistema IEB pode não funcionar com peões e ciclistas no escuro ou em túneis, mesmo com a iluminação da estrada.
O sistema IEB pode não funcionar se o veículo que circula à frente for estreito (por exemplo, um motociclo).
O sistema IEB pode não funcionar se a diferença de velocidade entre os dois veículos for demasiado reduzida.
O sistema IEB pode não funcionar devidamente ou detectar um veículo que siga em frente nas seguintes condições:
Má visibilidade (condições como chuva, neve, nevoeiro, tempestades de poeira, tempestades de areia e pulverização na estrada provocada por outros veículos).
Condução em descidas acentuadas ou estradas com curvas apertadas.
Condução em piso irregular, como estradas de terra batida acidentadas.
Se houver sujidade, gelo, neve ou qualquer outra matéria a cobrir a área do sensor de radar.
Interferência de outras fontes de radar.
Área da câmara, no pára-brisas, embaciada, suja, ou coberta por gotas de água, gelo, neve, etc.
Penetração de iluminação intensa (por exemplo, luz do sol ou faróis máximos de veículos em sentido contrário) na câmara dianteira. Iluminação intensa que lance sombra sobre a área em torno do peão ou ciclista, dificultando a visibilidade.
Alteração súbita da luminosidade. Por exemplo, quando o veículo entra ou sai de um túnel, área coberta de sombra ou relâmpagos.
Fraco contraste de um indivíduo com o pano de fundo, por exemplo, por ter vestida roupa de cor ou padrão semelhante ao ambiente.
Perfil do peão particularmente obscurecido devido ao facto de este transportar bagagem ou usar roupas ou acessórios volumosos ou muito folgados.
Quando o sistema nunca detectou um obstáculo desde que o veículo foi conduzido após o arranque do motor.
O desempenho do sistema pode ser pior nas seguintes condições:
Veículo conduzido em piso escorregadio.
Veículo conduzido num declive.
Banco traseiro ou área de bagagem do se veículo carregados com bagagem excessivamente pesada.
O sistema foi concebido para verificar automaticamente a funcionalidade do sensor (radar e câmara), mas dentro de determinadas limitações. O sistema poderá não detectar determinadas formas de obstrução da área do sensor, como por exemplo, gelo, neve, autocolantes, etc. Nesses casos, o sistema poderá não alertar adequadamente o condutor. Certifique-se de que verifica, limpa e desobstrui regularmente as áreas de sensor.
Em determinadas condições da estrada ou de trânsito, o sistema IEB pode aplicar, inesperadamente, travagem parcial. Quando for necessária aceleração, continue a premir o pedal do acelerador para se sobrepor ao sistema.
O ruído excessivo interfere com o aviso sonoro, que poderá não ser ouvido.
As distâncias de travagem aumentam em superfícies escorregadias.
O sistema Intelligent Emergency Braking (Travagem de emergência inteligente) poderá funcionar quando os seguintes itens tiverem contornos semelhantes a peões ou ciclistas, ou se tiverem o mesmo tamanho e a mesma posição das luzes traseiras de um veículo e motociclo.
Tinta, uma sombra ou um padrão na estrada, berma ou parede (incluindo delimitadores de faixa esmaecidos ou fora do comum).
Uma forma criada por estruturas rodoviárias (tais como túneis, viadutos, sinais de trânsito, reflectores instalados nas laterais de veículos, películas reflectoras e rails de protecção), objectos na berma da estrada (árvores, edifícios) e fontes de luz.
Uma forma criada por objectos à beira da estrada, tais como árvores, iluminação, sombras ou edifícios.
O sistema Intelligent Emergency Braking (Travagem de emergência inteligente) pode reagir a:
objectos à beira da estrada (sinal de trânsito, separador, peão, ciclista, motociclo, veículo, etc.)
objectos por cima da estrada (ponte baixa, sinal de trânsito, etc.)
objectos na superfície da estrada (carris, grelhas, placa de aço, etc.)
objectos num parque de estacionamento (viga, pilar, etc.)
peões ou ciclistas ou motociclos que se aproximem da faixa de rodagem
veículos, peões, ciclistas, motociclos ou objectos na faixa adjacente ou perto do veículo
peões, ciclistas em sentido contrário
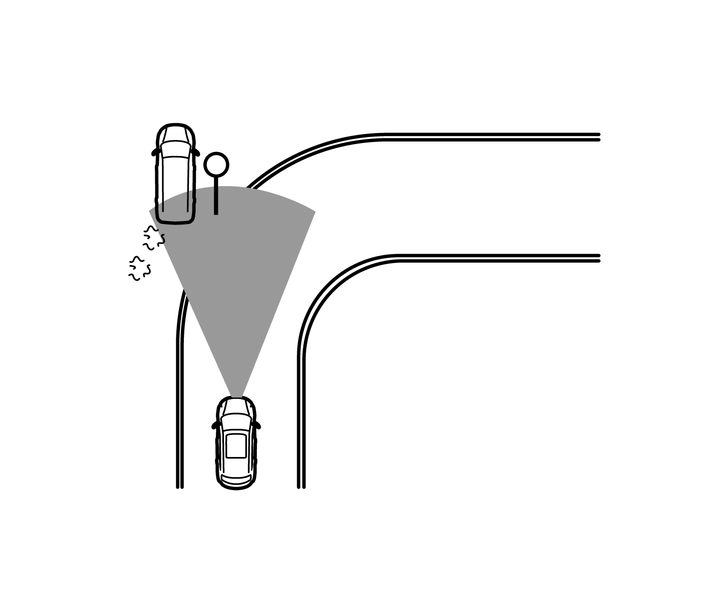
Quando conduzir em algumas estradas, como estradas sinuosas, colinas, curvas, estradas estreitas, ou estradas com obras ou numa subida, o sistema pode detectar veículos numa faixa diferente ou pode não detectar temporariamente um veículo à frente. Isso pode causar o funcionamento incorrecto do sistema.
A detecção de veículos também poderá ser afectada pela utilização do veículo (manobra de direcção ou posição de condução na faixa, etc.) ou pelo estado do veículo. Se tal ocorrer, o sistema poderá avisá-lo fazendo piscar o indicador do sistema e emitindo um sinal sonoro inesperadamente. Terá de controlar manualmente a distância correcta relativamente ao veículo da frente.