Nissan Juke 2024 Manual
7.22.2.1. Funcionamento do sistema
O sistema IEB actua quando o veículo é conduzido a velocidades superiores a 5 km/h (3 mph).
Se for detectado um risco de colisão dianteira, o sistema IEB fornece primeiro o aviso ao condutor acendendo o aviso (amarelo) no visor de informações do veículo e fornecendo um aviso sonoro.
Se, após o aviso, o condutor aplicar os travões com força e rapidez, e o sistema IEB detectar que ainda existe a possibilidade de colisão frontal, aumenta automaticamente a força de travagem.
Se o condutor não agir, o sistema IEB emite o segundo aviso visual (vermelho) e sonoro e, em seguida, o sistema aplica uma travagem parcial.
Se houver perigo iminente de colisão, o sistema IEB aplica automaticamente uma travagem mais potente.
Aviso | Visual | Audível |
Primeiro |
| Carrilhão |
Segundo |
| Sinal sonoro agudo |



As luzes de travão do veículo acendem-se quando o sistema IEB efectua uma travagem.
Quando o sistema IEB detecta um obstáculo no caminho do veículo e apresenta o aviso IEB, poderá ouvir-se um ruído proveniente do compartimento do motor enquanto o veículo enche os travões para melhorar o tempo de resposta.
Consoante a velocidade do veículo e a distância até ao veículo que segue à frente, bem como as condições de condução e da estrada, o sistema pode ajudar o condutor a evitar uma colisão à frente, ou ajudar a mitigar as consequências caso a colisão seja inevitável.
Se o condutor estiver a manusear o volante, a acelerar ou a travar, o sistema IEB actuará mais tarde ou não actuará.
A travagem automática pára nas seguintes condições:
Quando o volante é girado o necessário para evitar uma colisão.
Quando o pedal do acelerador está premido.
Quando deixa de ser detectado um veículo à frente.
Se o sistema IEB tiver parado o veículo, este permanecerá parado durante cerca de 2 segundos antes da libertação dos travões.
Segue-se uma lista das limitações do sistema Intelligent Emergency Braking (Travagem de emergência inteligente). A utilização do veículo sem ter em conta estas limitações do sistema pode dar origem a ferimentos graves ou morte.
O sistema IEB não consegue detectar todos os veículos em todas as condições.
O sensor de radar não detecta os seguintes elementos:
Peões, animais ou obstáculos na estrada
Veículos em sentido contrário
Veículos na transversal
O sensor de radar tem algumas limitações ao seu desempenho. Se houver um veículo imobilizado no caminho do veículo, o sistema IEB não funciona quando o veículo é conduzido a velocidades superiores a cerca de 80 km/h (50 mph).
O sensor de radar pode não detectar um veículo que siga em frente nas seguintes condições:
Sensor de radar coberto de sujidade, gelo, neve ou qualquer outra matéria.
Interferência de outras fontes de radar.
Neve ou água projectadas por outros veículos em movimento.
O veículo que segue à frente é estreito (por ex., motociclo).
Condução em descidas acentuadas ou estradas com curvas apertadas.
Ao rebocar um atrelado.
Em determinadas condições da estrada ou de trânsito, o sistema IEB pode aplicar, inesperadamente, travagem parcial. Quando for necessária aceleração, continue a premir o pedal do acelerador para se sobrepor ao sistema.
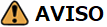
O sistema IEB pode reagir a objectos na berma (sinais de trânsito, rails de protecção, etc.).
As distâncias de travagem aumentam em superfícies escorregadias.
O ruído excessivo interfere com o aviso sonoro, que poderá não ser ouvido.
O sistema foi concebido para verificar automaticamente o funcionamento do sensor, dentro de certas limitações. O sistema pode não alertar sempre o condutor quanto a problemas funcionais nos primeiros minutos após o arranque do motor. O sistema pode não conseguir detectar algumas formas de obstrução na área do sensor, como por exemplo, gelo, neve, lama, autocolantes. Nestes casos, o sistema poderá não ter a capacidade de avisar adequadamente o condutor. Certifique-se de que verifica, limpa e desobstrui regularmente a área do sensor.
O sistema Intelligent Emergency Braking (Travagem de emergência inteligente) pode reagir a
objectos à beira da estrada (sinal de trânsito, separador, peão, veículo, etc.)
objectos por cima da estrada (ponte baixa, sinal de trânsito, etc.)
objectos na superfície da estrada (carris, grelhas, placa de aço, etc.)
objectos num parque de estacionamento (viga, pilar, etc.)
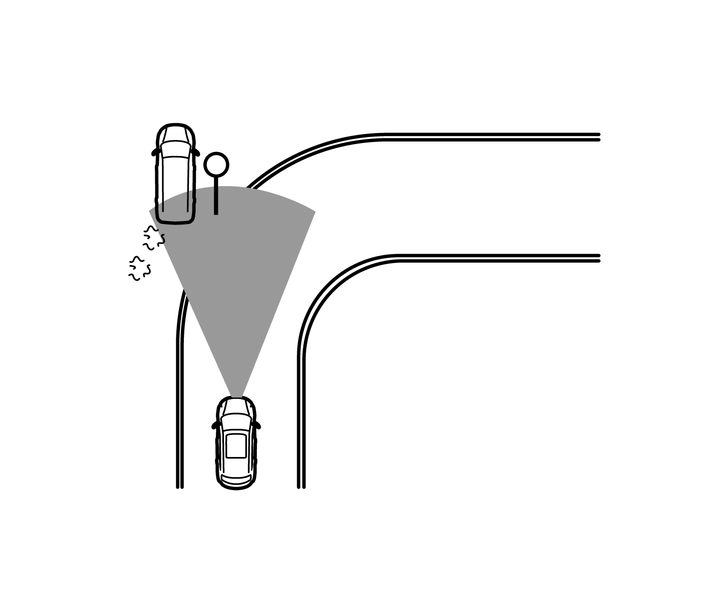
Durante a condução em determinadas estradas, como por exemplo, estradas sinuosas, acidentadas, com curvas ou estreitas, bem como em estadas em obras, o sensor pode detectar veículos numa faixa diferente, ou pode, temporariamente, não detectar um veículo que circule à frente. Isso pode causar o funcionamento incorrecto do sistema.
A detecção de veículos também poderá ser afectada pela utilização do veículo (manobra de direcção ou posição de condução na faixa, etc.) ou pelo estado do veículo. Se tal ocorrer, o sistema poderá avisá-lo fazendo piscar o indicador do sistema e emitindo um sinal sonoro inesperadamente. Terá de controlar manualmente a distância correcta relativamente ao veículo da frente.